#include <iostream>#include <string>#include "DASRT.h"#include "lo-mappers.h"#include "defun-dld.h"#include "error.h"#include "gripes.h"#include "oct-obj.h"#include "ov-fcn.h"#include "ov-cell.h"#include "pager.h"#include "parse.h"#include "unwind-prot.h"#include "utils.h"#include "variables.h"#include "DASRT-opts.cc"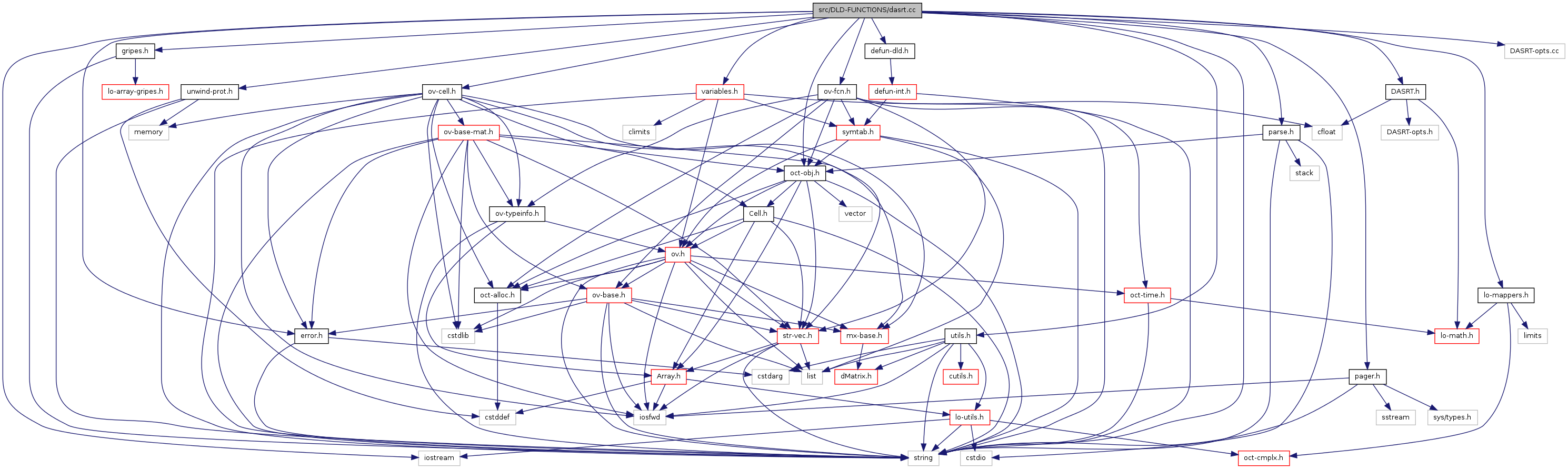
Go to the source code of this file.
Defines | |
| #define | DASRT_ABORT return retval |
| #define | DASRT_ABORT1(msg) |
| #define | DASRT_ABORT2(fmt, arg) |
Functions | |
| static ColumnVector | dasrt_user_cf (const ColumnVector &x, double t) |
| static ColumnVector | dasrt_user_f (const ColumnVector &x, const ColumnVector &xdot, double t, octave_idx_type &) |
| static Matrix | dasrt_user_j (const ColumnVector &x, const ColumnVector &xdot, double t, double cj) |
| DEFUN_DLD (dasrt, args, nargout,"-*- texinfo -*-\n\ @deftypefn {Loadable Function} {[@var{x}, @var{xdot}, @var{t_out}, @var{istat}, @var{msg}] =} dasrt (@var{fcn}, [], @var{x_0}, @var{xdot_0}, @var{t})\n\ @deftypefnx {Loadable Function} {@dots{} =} dasrt (@var{fcn}, @var{g}, @var{x_0}, @var{xdot_0}, @var{t})\n\ @deftypefnx {Loadable Function} {@dots{} =} dasrt (@var{fcn}, [], @var{x_0}, @var{xdot_0}, @var{t}, @var{t_crit})\n\ @deftypefnx {Loadable Function} {@dots{} =} dasrt (@var{fcn}, @var{g}, @var{x_0}, @var{xdot_0}, @var{t}, @var{t_crit})\n\ Solve the set of differential-algebraic equations\n\ @tex\n\ $$ 0 = f (x, \\dot{x}, t) $$\n\ with\n\ $$ x(t_0) = x_0, \\dot{x}(t_0) = \\dot{x}_0 $$\n\ @end tex\n\ @ifnottex\n\ \n\ @example\n\ 0 = f (x, xdot, t)\n\ @end example\n\ \n\ @noindent\n\ with\n\ \n\ @example\n\ x(t_0) = x_0, xdot(t_0) = xdot_0\n\ @end example\n\ \n\ @end ifnottex\n\ with functional stopping criteria (root solving).\n\ \n\ The solution is returned in the matrices @var{x} and @var{xdot},\n\ with each row in the result matrices corresponding to one of the\n\ elements in the vector @var{t_out}. The first element of @var{t}\n\ should be @math{t_0} and correspond to the initial state of the\n\ system @var{x_0} and its derivative @var{xdot_0}, so that the first\n\ row of the output @var{x} is @var{x_0} and the first row\n\ of the output @var{xdot} is @var{xdot_0}.\n\ \n\ The vector @var{t} provides an upper limit on the length of the\n\ integration. If the stopping condition is met, the vector\n\ @var{t_out} will be shorter than @var{t}, and the final element of\n\ @var{t_out} will be the point at which the stopping condition was met,\n\ and may not correspond to any element of the vector @var{t}.\n\ \n\ The first argument, @var{fcn}, is a string, inline, or function handle\n\ that names the function @math{f} to call to compute the vector of\n\ residuals for the set of equations. It must have the form\n\ \n\ @example\n\ @var{res} = f (@var{x}, @var{xdot}, @var{t})\n\ @end example\n\ \n\ @noindent\n\ in which @var{x}, @var{xdot}, and @var{res} are vectors, and @var{t} is a\n\ scalar.\n\ \n\ If @var{fcn} is a two-element string array or a two-element cell array\n\ of strings, inline functions, or function handles, the first element names\n\ the function @math{f} described above, and the second element names a\n\ function to compute the modified Jacobian\n\ \n\ @tex\n\ $$\n\ J = {\\partial f \\over \\partial x}\n\ + c {\\partial f \\over \\partial \\dot{x}}\n\ $$\n\ @end tex\n\ @ifnottex\n\ \n\ @example\n\ @group\n\ df df\n\ jac = -- + c ------\n\ dx d xdot\n\ @end group\n\ @end example\n\ \n\ @end ifnottex\n\ \n\ The modified Jacobian function must have the form\n\ \n\ @example\n\ @group\n\ \n\ @var{jac} = j (@var{x}, @var{xdot}, @var{t}, @var{c})\n\ \n\ @end group\n\ @end example\n\ \n\ The optional second argument names a function that defines the\n\ constraint functions whose roots are desired during the integration.\n\ This function must have the form\n\ \n\ @example\n\ @var{g_out} = g (@var{x}, @var{t})\n\ @end example\n\ \n\ @noindent\n\ and return a vector of the constraint function values.\n\ If the value of any of the constraint functions changes sign, @sc{dasrt}\n\ will attempt to stop the integration at the point of the sign change.\n\ \n\ If the name of the constraint function is omitted, @code{dasrt} solves\n\ the same problem as @code{daspk} or @code{dassl}.\n\ \n\ Note that because of numerical errors in the constraint functions\n\ due to round-off and integration error, @sc{dasrt} may return false\n\ roots, or return the same root at two or more nearly equal values of\n\ @var{T}. If such false roots are suspected, the user should consider\n\ smaller error tolerances or higher precision in the evaluation of the\n\ constraint functions.\n\ \n\ If a root of some constraint function defines the end of the problem,\n\ the input to @sc{dasrt} should nevertheless allow integration to a\n\ point slightly past that root, so that @sc{dasrt} can locate the root\n\ by interpolation.\n\ \n\ The third and fourth arguments to @code{dasrt} specify the initial\n\ condition of the states and their derivatives, and the fourth argument\n\ specifies a vector of output times at which the solution is desired,\n\ including the time corresponding to the initial condition.\n\ \n\ The set of initial states and derivatives are not strictly required to\n\ be consistent. In practice, however, @sc{dassl} is not very good at\n\ determining a consistent set for you, so it is best if you ensure that\n\ the initial values result in the function evaluating to zero.\n\ \n\ The sixth argument is optional, and may be used to specify a set of\n\ times that the DAE solver should not integrate past. It is useful for\n\ avoiding difficulties with singularities and points where there is a\n\ discontinuity in the derivative.\n\ \n\ After a successful computation, the value of @var{istate} will be\n\ greater than zero (consistent with the Fortran version of @sc{dassl}).\n\ \n\ If the computation is not successful, the value of @var{istate} will be\n\ less than zero and @var{msg} will contain additional information.\n\ \n\ You can use the function @code{dasrt_options} to set optional\n\ parameters for @code{dasrt}.\n\ @seealso{dasrt_options, daspk, dasrt, lsode}\n\ @end deftypefn") | |
Variables | |
| static int | call_depth = 0 |
| static octave_function * | dasrt_cf |
| static octave_function * | dasrt_f |
| static octave_function * | dasrt_j |
| static bool | warned_cf_imaginary = false |
| static bool | warned_fcn_imaginary = false |
| static bool | warned_jac_imaginary = false |
| #define DASRT_ABORT1 | ( | msg | ) |
do \ { \ ::error ("dasrt: " msg); \ DASRT_ABORT; \ } \ while (0)
Definition at line 193 of file dasrt.cc.
Referenced by DEFUN_DLD().
| #define DASRT_ABORT2 | ( | fmt, | ||
| arg | ||||
| ) |
do \ { \ ::error ("dasrt: " fmt, arg); \ DASRT_ABORT; \ } \ while (0)
Definition at line 201 of file dasrt.cc.
Referenced by DEFUN_DLD().
| static ColumnVector dasrt_user_cf | ( | const ColumnVector & | x, | |
| double | t | |||
| ) | [static] |
Definition at line 105 of file dasrt.cc.
References octave_base_value::do_multi_index_op(), error_state, gripe_user_supplied_eval(), Array< T >::length(), octave_value_list::length(), and warning().
Referenced by DEFUN_DLD().
| static ColumnVector dasrt_user_f | ( | const ColumnVector & | x, | |
| const ColumnVector & | xdot, | |||
| double | t, | |||
| octave_idx_type & | ||||
| ) | [static] |
Definition at line 61 of file dasrt.cc.
References Array< T >::capacity(), octave_base_value::do_multi_index_op(), error_state, gripe_user_supplied_eval(), Array< T >::length(), octave_value_list::length(), and warning().
Referenced by DEFUN_DLD().
| static Matrix dasrt_user_j | ( | const ColumnVector & | x, | |
| const ColumnVector & | xdot, | |||
| double | t, | |||
| double | cj | |||
| ) | [static] |
Definition at line 145 of file dasrt.cc.
References Array< T >::capacity(), octave_base_value::do_multi_index_op(), error_state, gripe_user_supplied_eval(), Array< T >::length(), octave_value_list::length(), and warning().
Referenced by DEFUN_DLD().
| DEFUN_DLD | ( | dasrt | , | |
| args | , | |||
| nargout | ||||
| ) |
Definition at line 209 of file dasrt.cc.
References octave_value::cell_value(), clear_function(), DASRT_ABORT1, DASRT_ABORT2, dasrt_user_cf(), dasrt_user_f(), dasrt_user_j(), DASRT_result::deriv(), error(), DASRT::error_message(), error_state, extract_function(), octave_base_value::function_value(), octave_value::function_value(), DASRT::integrate(), base_diff_eqn::integration_ok(), base_diff_eqn::integration_state(), octave_value::is_cell(), octave_value::is_function_handle(), octave_value::is_inline_function(), is_valid_function(), Array< T >::length(), print_usage(), unwind_protect::protect_var(), octave_value::rows(), DAERTFunc::set_constraint_function(), DAEFunc::set_jacobian_function(), DASRT_result::state(), state, DASRT_result::times(), and unique_symbol_name().
int call_depth = 0 [static] |
octave_function* dasrt_cf [static] |
octave_function* dasrt_f [static] |
octave_function* dasrt_j [static] |
bool warned_cf_imaginary = false [static] |
bool warned_fcn_imaginary = false [static] |
bool warned_jac_imaginary = false [static] |
 1.7.1
1.7.1

